








栈的基本概念
栈的定义:
- 栈(Stack)是只允许在一端进行插入或删除操作的线性表
- 逻辑结构:与普通线性表相同
- 数据的运算:插入、删除操作有区别
- 栈顶:允许插入和删除的一端,对应元素被称为栈顶元素
- 栈底:不允许插入和删除的一端,对应元素被称为栈底元素
- 特点:后进先出Last In First Out(LIFO)
栈的基本操作:
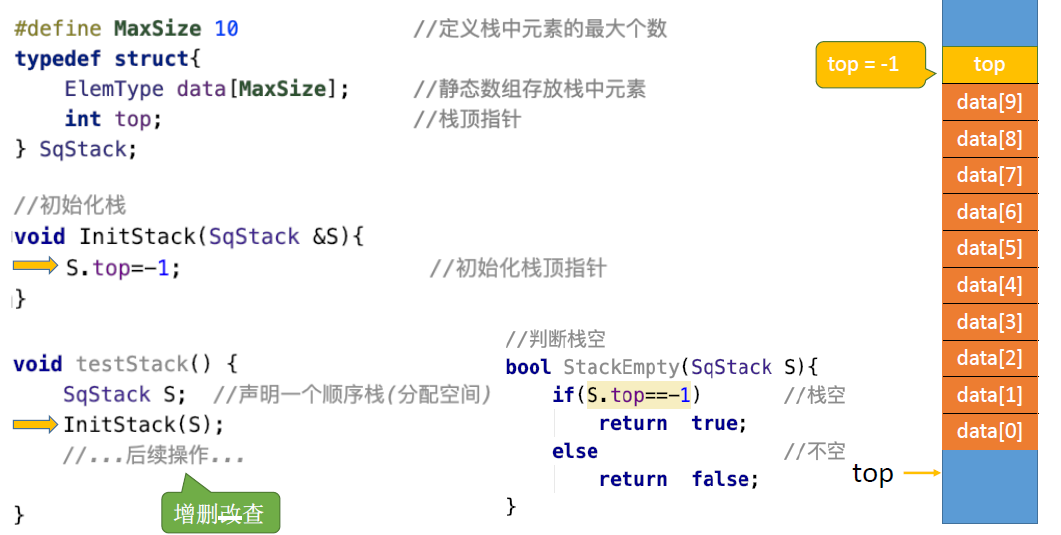
- InitStack(&S):初始化栈。构造一个空栈S,分配内存空间。
- DestroyStack(&S):销毁栈。销毁并释放栈S所占用的内存空间。
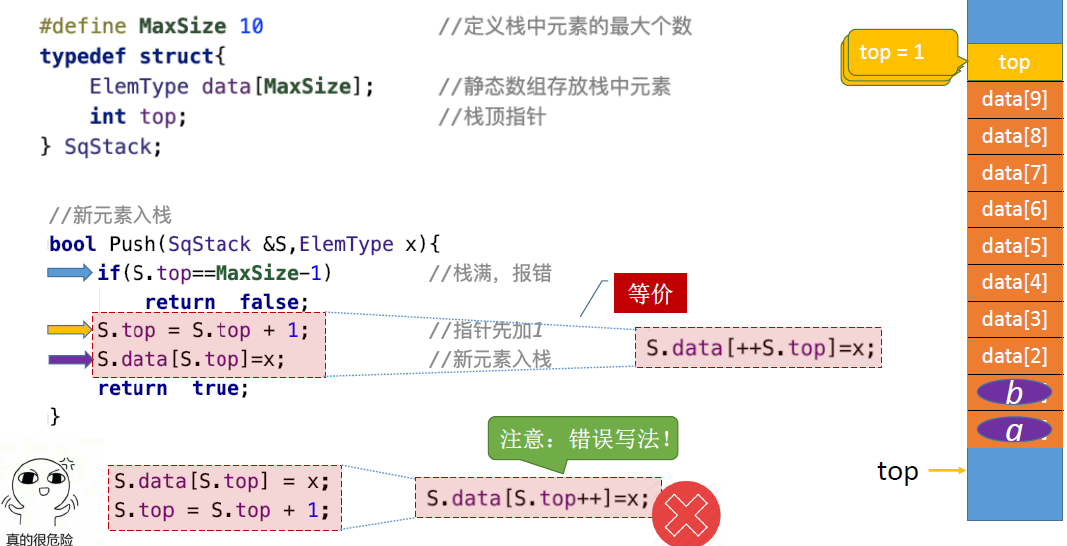
- Push(&S,x):进栈,若栈S未满,则将x加入使之成为新栈顶。
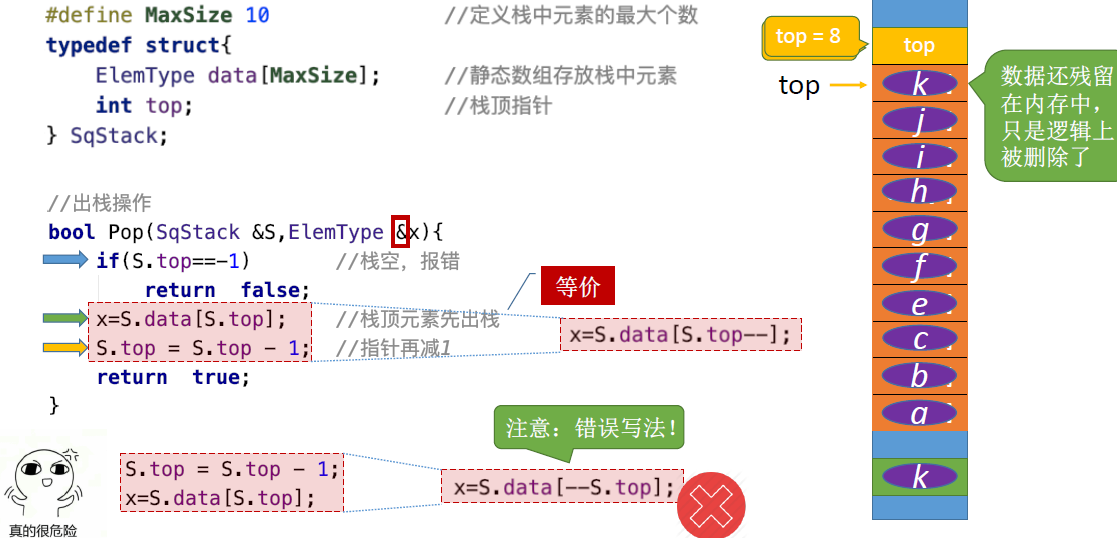
- Pop(&S,&x):出栈,若栈S非空,则弹出栈顶元素,并用x返回。
- GetTop(S, &x):读栈顶元素。若栈S非空,则用x返回栈顶元素
- StackEmpty(S):判断一个栈S是否为空。若S为空,则返回true,否则返回false。
出栈顺序数量:
- n个不同元素进栈,出栈元素不同排列的个数为

- 上述公式称为卡特兰(Catalan)数,可采用数学归纳法证明
栈的顺序存储结构
顺序栈的定义和初始化:
进栈操作:
出栈操作:
读取栈顶元素:

注意:也可以让栈顶指针top先指向0,每次进栈S.top++,出栈--S.top
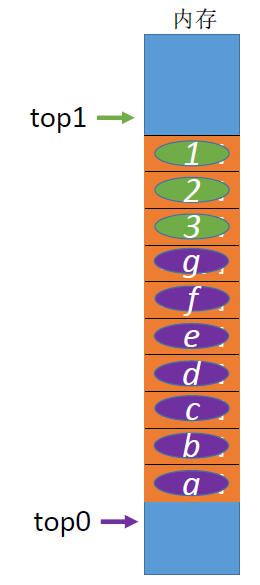
共享栈:
- 使用静态数组要求提前规定好栈的大小,容易造成内存资源的浪费因此共享栈应运而生
- 两个栈共享同一片空间,0、1号栈朝着同一方向进栈
- 栈满的条件:top0 + 1 == top1

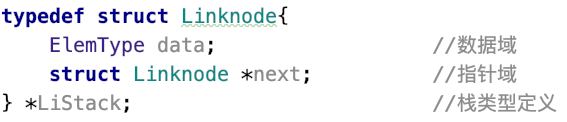
栈的链式存储结构
栈的链式存储实质:
- 进栈:头插法建立单链表,也就是对头结点的后插操作
- 出栈:单链表的删除操作,对头结点的“后删”操作
- 推荐使用不带头结点的链栈
- 创销增删查的操作参考链表
链栈的定义:
队列的基本概念
队列的定义:
- 栈(Stack)是只允许在一端进行插入或删除操作的操作受限的线性表
- 队列(Queue)是只允许在一端进行插入,在另一端删除的线性表
- 队头:允许删除的一端,对应的元素被称为队头元素
- 队尾:允许插入的一端,对应的元素被称为队尾元素
- 队列的特点:先进先出First In First Out(FIFO)
队列的基本操作:
- InitQueue(&Q):初始化队列,构造一个空队列Q。
- DestroyQueue(&Q):销毁队列。销毁并释放队列Q所占用的内存空间。
- EnQueue(&Q,x):入队,若队列Q未满,将x加入,使之成为新的队尾。
- DeQueue(&Q,&x):出队,若队列Q非空,删除队头元素,并用x返回。
- GetHead(Q,&x):读队头元素,若队列Q非空,则将队头元素赋值给x。
- QueueEmpty(Q):判队列空,若队列Q为空返回true,否则返回false。
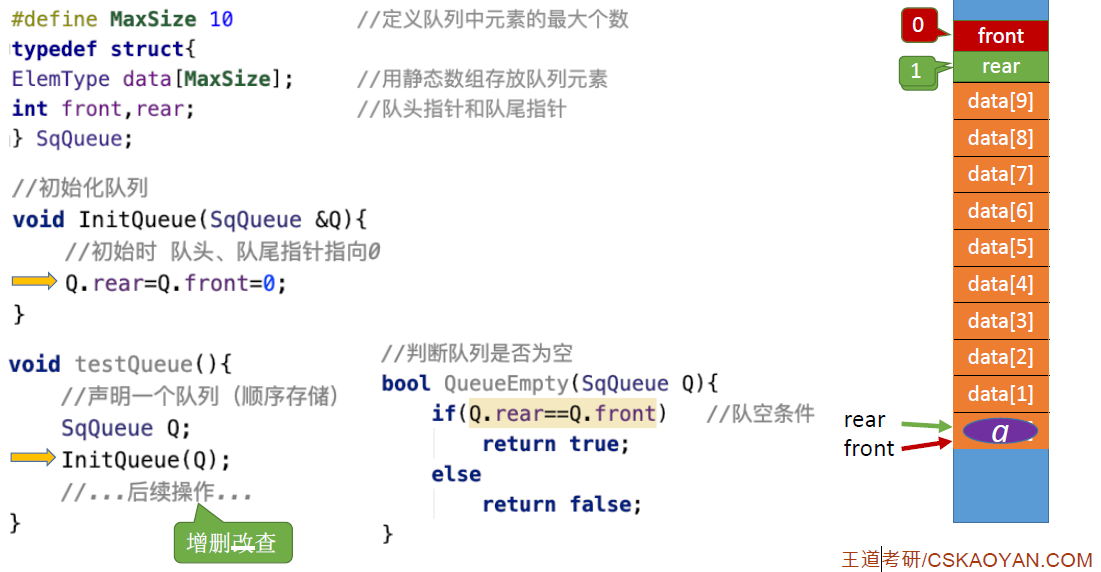
队列的顺序存储结构
队列的定义和初始化:
入队操作:
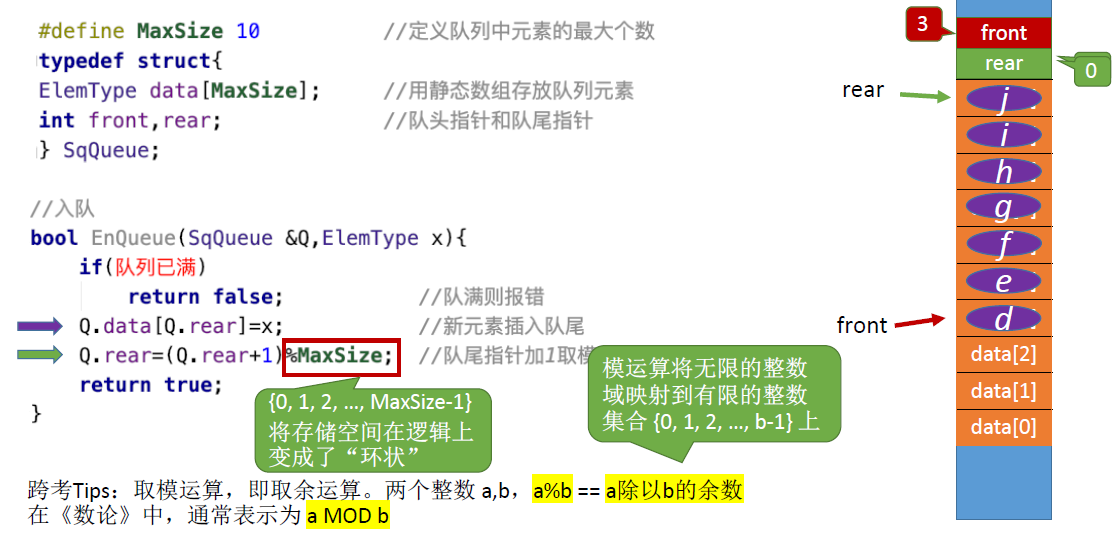
- 通过取余操作,只要队列不满,就可以一直利用之前已经出队了的空间,逻辑上实现了循环队列的操作
- 于是,队列已满的条件:队尾指针的再下一个位置是队头,即(Q.rear+1)%MaxSize==Q.front
- 代价:牺牲了一个存储单元,因为如果rear和front相同,与判空的条件相同了
出队操作:
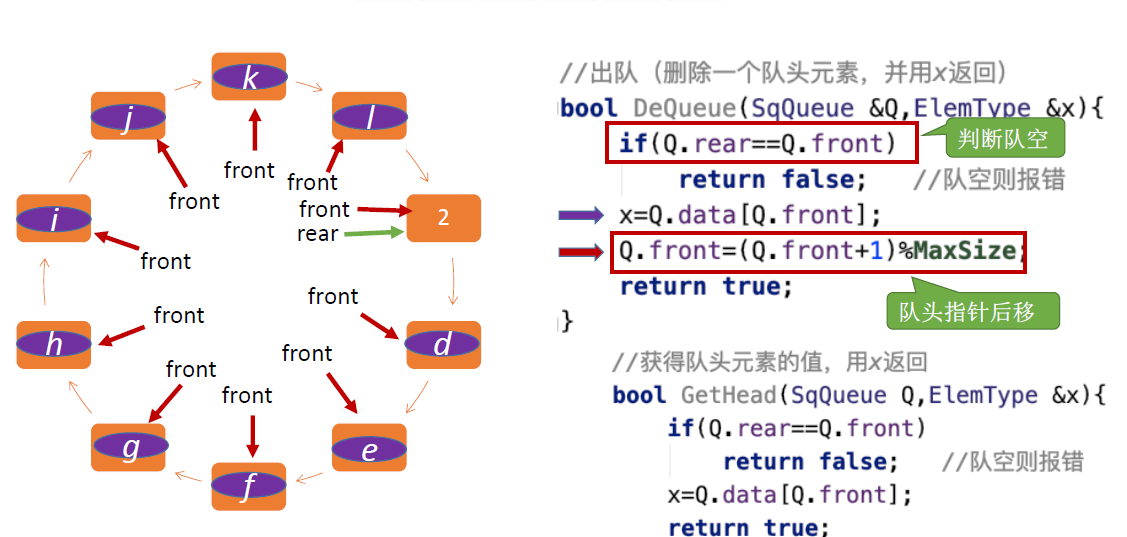
实际上获取队头元素的值就是出队操作去掉队头指针后移的代码
判断队列已满/已空:
方案1:
- 使用前面讲的牺牲一个存储空间的方式来解决
- 初始化时rear=front=0
- 队列元素个数:(rear+MaxSize-front)%MaxSize
- 队列已满的条件:队尾指针的再下一个位置是队头,即(Q.rear+1)%MaxSize==Q.front
- 队空条件:Q.rear==Q.front
方案2:
- 不牺牲一个存储空间,在结构体中多建立一个变量size
- 初始化时rear=front=0;size = 0;
- 队列元素个数= size
- 插入成功size++;删除成功size--;
- 此时队满条件:size==MaxSize
- 队空条件:size == 0;
方案3:
- 不牺牲一个存储空间,在结构体中多建立一个变量tag
- 初始化时rear=front=0;tag = 0;
- 因为只有删除操作,才可能导致队空,只有插入操作,才可能导致队满因此
- 每次删除操作成功时,都令tag=0;
- 每次插入操作成功时,都令tag=1;
- 队满条件:front==rear && tag == 1
- 队空条件:front==rear && tag == 0
- 队列元素个数:(rear+MaxSize-front)%MaxSize
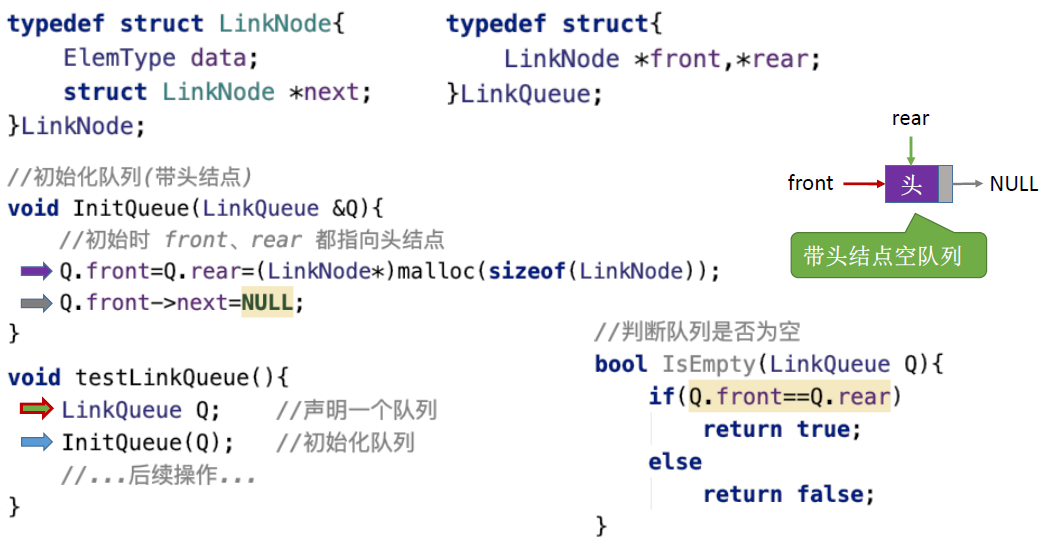
队列的链式存储结构
初始化(带头结点):
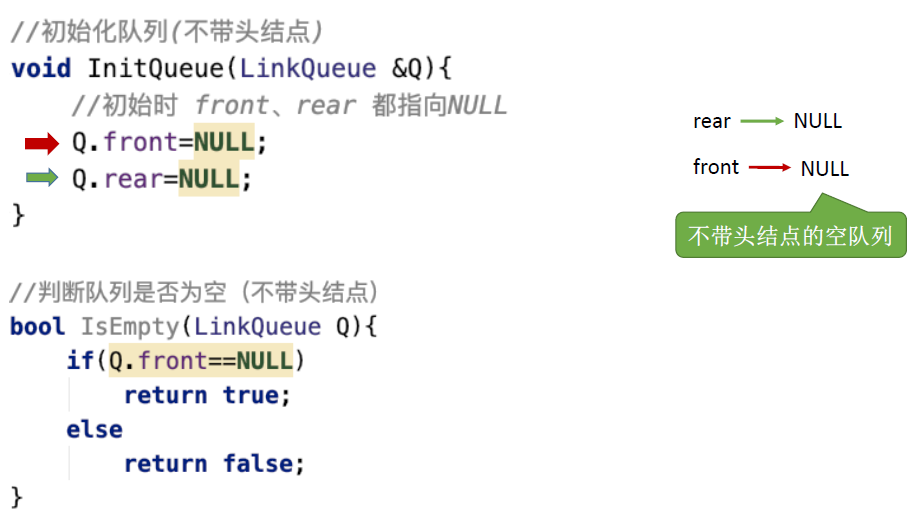
初始化(不带头结点):
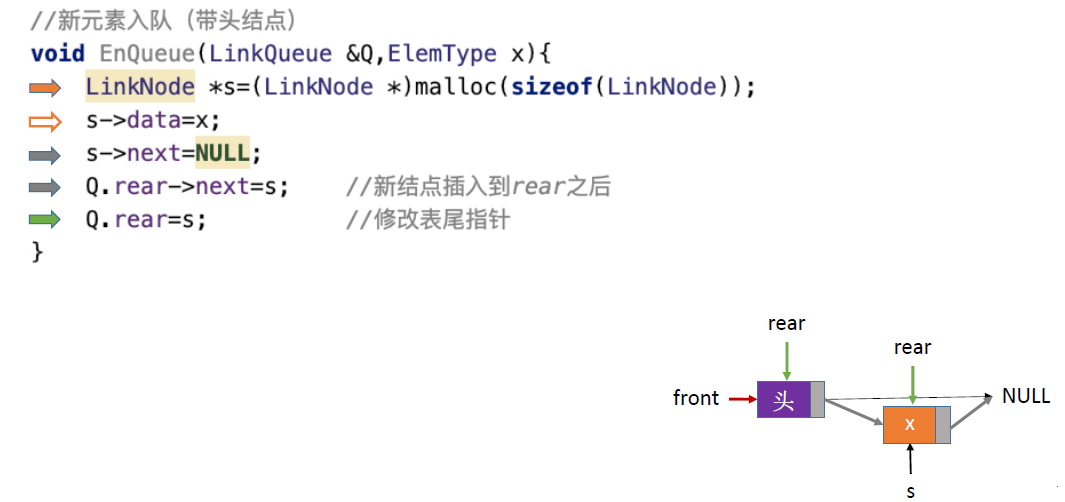
入队(带头结点):
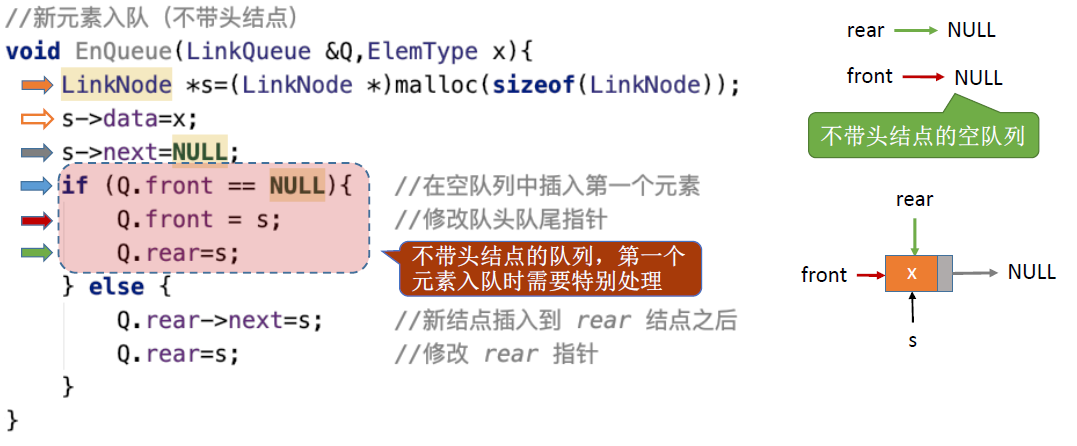
入队(不带头结点):
出队(带头结点):
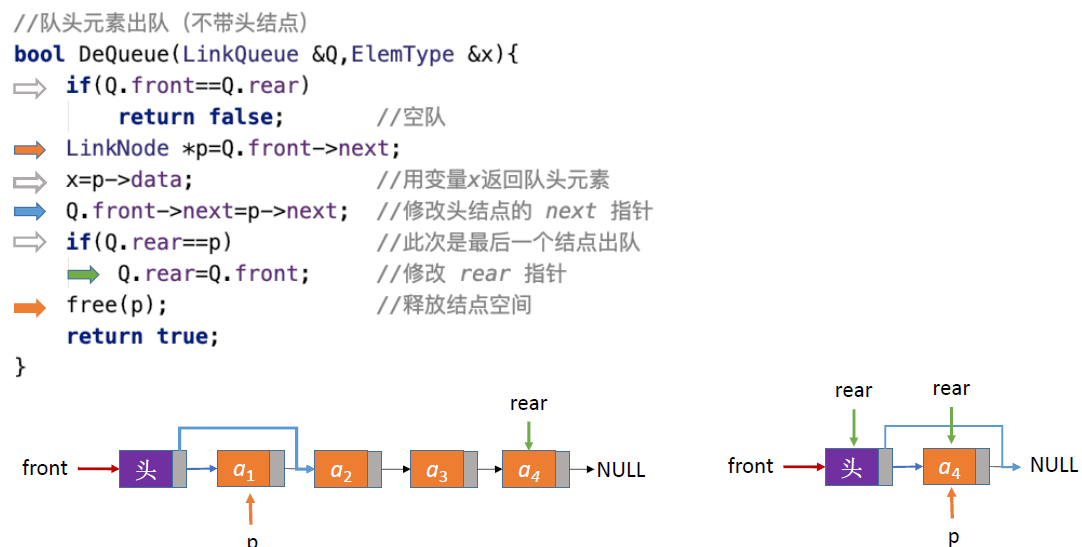
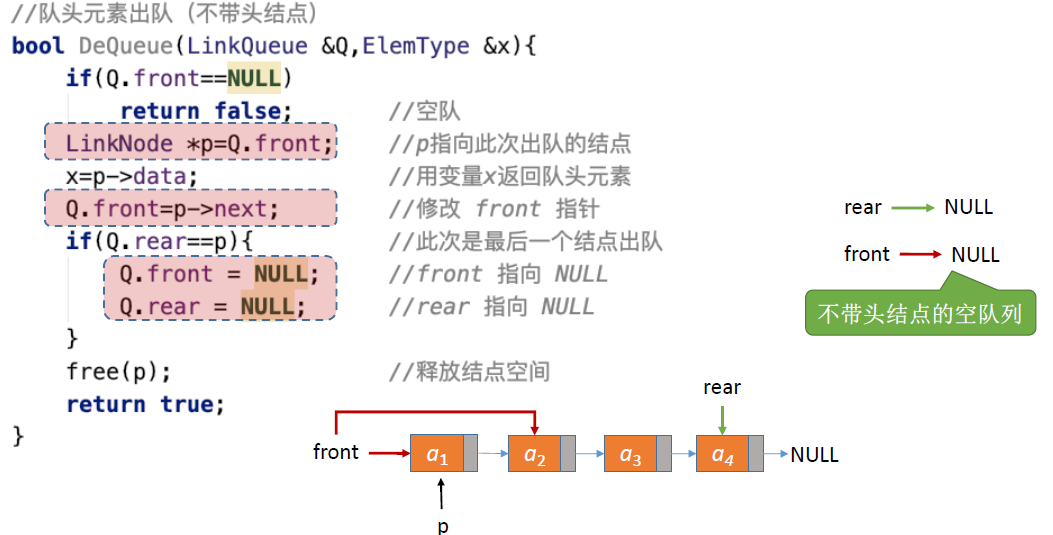
出队(不带头结点):
队列满的条件:
- 顺序存储:预分配的空间耗尽时队满
- 链式存储:一般不会队满,除非内存不足
- 因此一般不用考虑队满
双端队列
定义:
- 双端队列:只允许从两端插入、两端删除的线性表
- 输入受限的双端队列:只允许从一端插入、两端删除的线性表
- 输出受限的双端队列:只允许从两端插入、一端删除的线性表
- 不管是怎么样的双端队列实际都是栈和队列的变种
考点:
- 判断输出序列合法性
- 在栈中合法的输出序列,在双端队列中必定合法
栈在括号匹配中的应用
括号匹配问题:
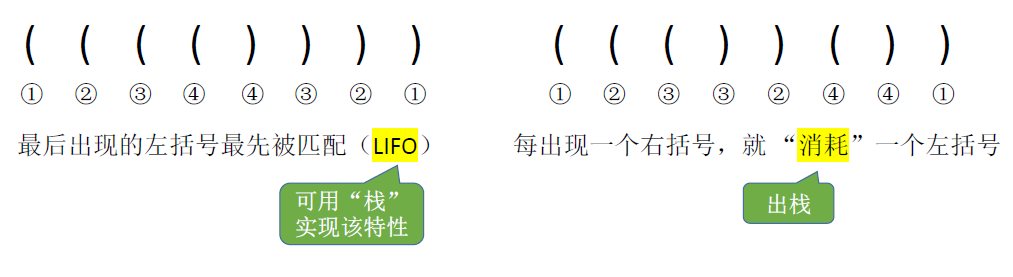
- 若有括号无法被匹配则出现编译错误
- 遇到左括号就入栈
- 遇到右括号,就“消耗”一个左括号
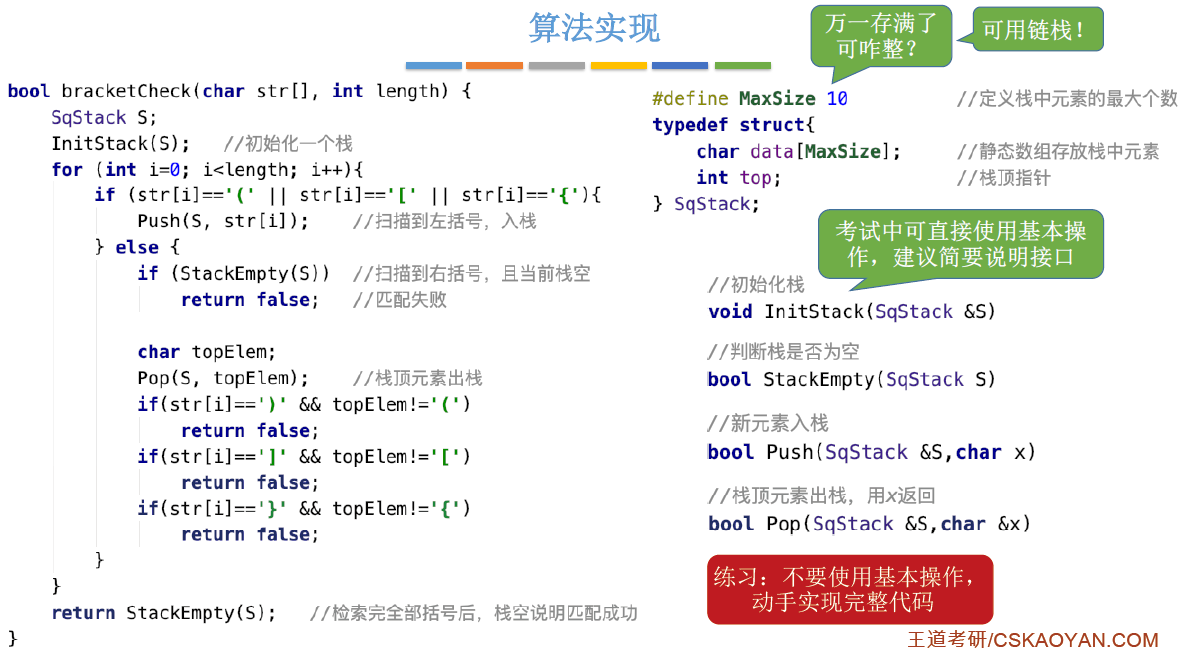
代码实现:
栈在表达式求值中的应用
算数表达式:
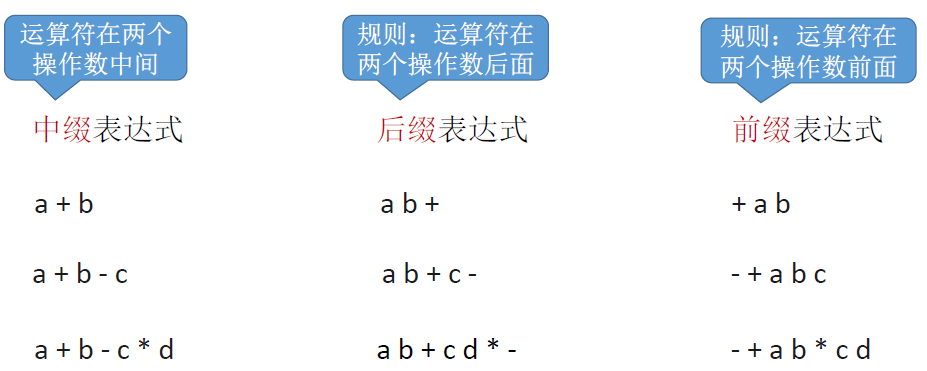
- 由三个部分组成:操作数、运算符、界限符
- 我们平时写的算术表达式都是中缀表达式
- 如何可以不用界限符也能无歧义地表达运算顺序
- Reverse Polish notation(逆波兰表达式=后缀表达式)
- Polish notation(波兰表达式=前缀表达式)
中缀、后缀、前缀表达式:
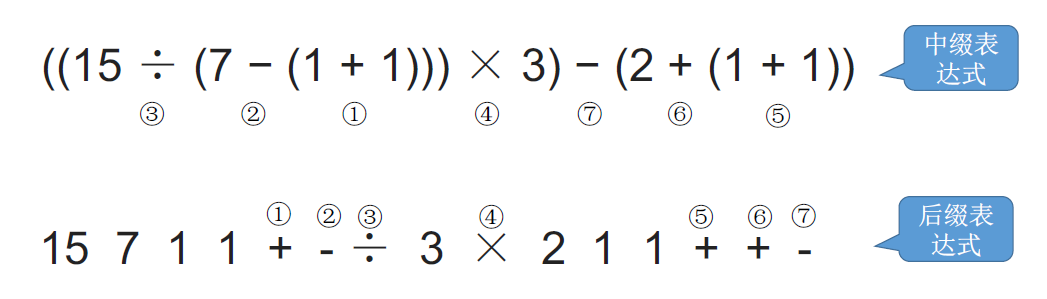
中缀转后缀的方法(手算):
- 确定中缀表达式中各个运算符的运算顺序
- 选择下一个运算符,按照「左操作数右操作数运算符」的方式组合成一个新的操作数
- 如果还有运算符没被处理,就继续第二步
- 注意:运算顺序不唯一,因此对应的后缀表达式也不唯一
- “左优先”原则:只要左边的运算符能先计算,就优先算左边的,保证手算和机算是一致的
中缀表达式转后缀表达式(机算,用栈实现):
- 初始化一个栈,用于保存暂时还不能确定运算顺序的运算符。
- 从左到右处理各个元素,直到末尾。可能遇到三种情况:
- 遇到操作数。直接加入后缀表达式。
- 遇到界限符。遇到“(”直接入栈;遇到“)”则依次弹出栈内运算符并加入后缀表达式,直到弹出“(”为止。注意:“(”不加入后缀表达式。
- 遇到运算符。依次弹出栈中优先级高于或等于当前运算符的所有运算符,并加入后缀表达式,若碰到“(”或栈空则停止。之后再把当前运算符入栈。
- 按上述方法处理完所有字符后,将栈中剩余运算符依次弹出,并加入后缀表达式。
后缀表达式的计算(手算):
- 从左往右扫描,每遇到一个运算符,就让运算符前面最近的两个操作数执行对应运算,合体为一个操作数
- 注意:两个操作数的左右顺序
- 特点:最后出现的操作数先被运算,LIFO(后进先出),可以使用栈来完成这个步骤
- “左优先”原则:只要左边的运算符能先计算,就优先算左边的
后缀表达式的计算(机算,用栈实现):
- 从左往右扫描下一个元素,直到处理完所有元素
- 若扫描到操作数则压入栈,并回到第一步;否则执行第三步
- 若扫描到运算符,则弹出两个栈顶元素,执行相应运算,运算结果压回栈顶,回到第一步
- 注意:先出栈的是“右操作数”
- 若表达式合法,则最后栈中只会留下一个元素,就是最终结果
- 后缀表达式适用于基于栈的编程语言(stack-orientedprogramming language),如:Forth、PostScript
中缀表达式转前缀表达式(手算):
- 确定中缀表达式中各个运算符的运算顺序
- 选择下一个运算符,按照「运算符左操作数右操作数」的方式组合成一个新的操作数
- 如果还有运算符没被处理,就继续第二步
- “右优先”原则:只要右边的运算符能先计算,就优先算右边的
中缀表达式的计算(机算,用栈实现):
- 中缀表达式的计算=中缀转后缀+后缀表达式求值,两个算法的结合
- 用栈实现中缀表达式的计算:
- 初始化两个栈,操作数栈和运算符栈
- 若扫描到操作数,压入操作数栈
- 若扫描到运算符或界限符,则按照“中缀转后缀”相同的逻辑压入运算符栈(期间也会弹出运算符,每当弹出一个运算符时,就需要再弹出两个操作数栈的栈顶元素并执行相应运算,运算结果再压回操作数栈)
栈在递归中的应用
函数调用的特点:
- 最后被调用的函数最先执行结束(LIFO)
- 函数调用时,需要用一个栈(函数调用栈)存储,里面包含以下信息:
- 调用返回地址
- 实参
- 局部变量
- 适合用“递归”算法解决:可以把原始问题转换为属性相同,但规模较小的问题
栈在递归中的应用:
- 计算正整数的阶乘n!
- 求斐波那契数列
- ......
栈在递归中过程:
- 递归调用时,函数调用栈可称为“递归工作栈”
- 每进入一层递归,就将递归调用所需信息压入栈顶
- 每退出一层递归,就从栈顶弹出相应信息
- 缺点:
- 太多层递归可能会导致栈溢出
- 可能包含很多重复计算
队列的应用
- 树的层次遍历
- 图的广度优先遍历
- 操作系统中的应用
- 多个进程争抢着使用有限的系统资源时,FCFS(First Come First Service,先来先服务)是一种常用策略。可以用队列实现
- CPU资源的分配
- 打印数据缓冲区
特殊矩阵的压缩储存
一维数组的存储结构:
- 起始地址:LOC
- 各数组元素大小相同,且物理上连续存放。
- 数组元素a[i]的存放地址= LOC + i * sizeof(ElemType)
二维数组的存储结构:
- 分为行优先和列优先,本质就是把二维的逻辑视角转换为内存中的一维储存
- M行N列的二维数组b[M][N]中,若按行优先存储,则b[i][j]的存储地址= LOC + (i*N + j) * sizeof(ElemType)
- M行N列的二维数组b[M][N]中,若按列优先存储,则b[i][j]的存储地址= LOC + ( j*M+ i ) * sizeof(ElemType)
- 二维数组也有随机存储的特性
普通矩阵的存储:
- 可用二维数组存储
- 注意:描述矩阵元素时,行、列号通常从1开始;而描述数组时通常下标从0开始
- 某些特殊矩阵可以压缩存储空间(比如对称矩阵)
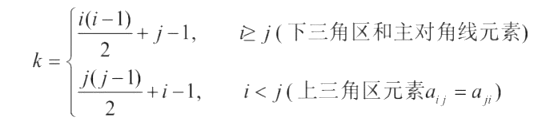
对称矩阵的压缩存储:
- 若n阶方阵中任意一个元素ai,j都有ai,j = aj,i则该矩阵为对称矩阵
- 普通存储:n*n二维数组
- 压缩存储策略:只存储主对角线+下三角区(或主对角线+上三角区),按行优先原则将各元素存入一维数组中
- 数组大小应为多少:(1+n)*n/2
- 站在程序员的角度,对称矩阵压缩存储后怎样才能方便使用:可以实现一个“映射”函数矩阵下标->一维数组下标
- 按行优先的原则,ai,j是第几个元素:
三角矩阵的压缩存储:
- 下三角矩阵:除了主对角线和下三角区,其余的元素都相同
- 上三角矩阵:除了主对角线和上三角区,其余的元素都相同
- 压缩存储策略:按行优先原则将橙色区元素存入一维数组中,并在最后一个位置存储常量c
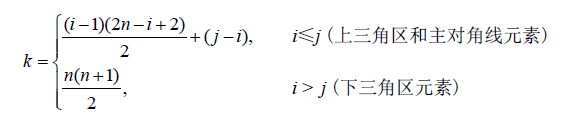
- 下三角矩阵,按行优先的原则,ai,j是第几个元素:
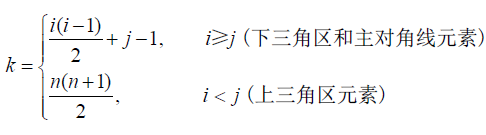
- 上三角矩阵,按行优先的原则,ai,j是第几个元素:
三对角矩阵的压缩存储:
- 三对角矩阵,又称带状矩阵:当|i - j|>1时,有ai,j = 0 (1≤ i, j ≤n)
- 压缩存储策略:按行优先(或列优先)原则,只存储带状部分
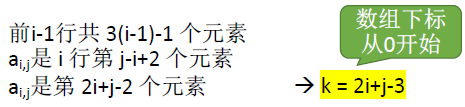
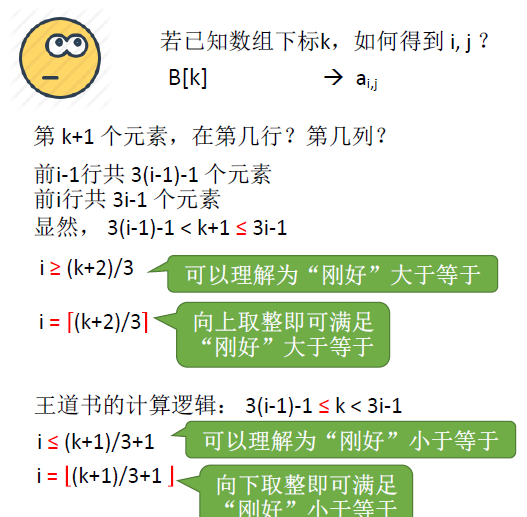
- 按行优先的原则,ai,j是第几个元素:
稀疏矩阵的压缩存储:
- 稀疏矩阵:非零元素远远少于矩阵元素的个数
- 压缩存储策略1:顺序存储——三元组<i(行),j(列),v(值)>,失去了数组随机存储的特性
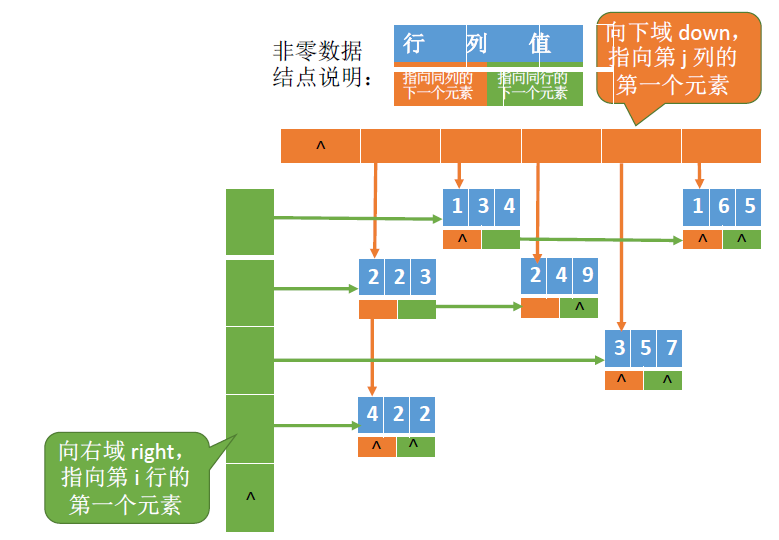
- 压缩存储策略2:链式存储,十字链表法


 加油
加油

